Scanners use light projectors for fast 3-D image reconstruction
In many industrial applications deployed for inspection and quality control, it is necessary to capture three-dimensional images of the object in order to rapidly analyze any structural defects.
Many inspection systems use a single structured light source that projects a single laser line onto the object as it moves along a conveyor. Reflected, distorted laser light from the object is then captured, often by a high-speed CMOS camera and used to generate a 3-D map of the object.
Structured-light-based systems are not especially fast because the object is subjected to a single structured light in a sequential fashion. To increase the speed of 3-D imaging, many companies are employing an alternative method to recreate these images.
Known as digital fringe projection, the technique projects a series of phase-shifted sinusoidal fringe patterns onto the object using a digital light projector (DLP). Like single-structured-light-source-based systems, reflected light is then captured by a single CMOS camera. A phase recovery and phase unwrapping algorithm is then used to generate a 2-D matrix known as an absolute phase map that corresponds to a point on the object’s surface. The absolute phase map can then be converted into a 3-D point cloud that represents the surface structure of the object.
To project phase-shifted sinusoidal fringe patterns onto an object, a number of technologies can be used. For example, in consumer-based gaming systems that must discern the placement, position, and structures of people within a room, nonintrusive infrared light sources are commonly used.
Indeed, this is the concept behind the Kinect Camera from Microsoft (Redmond, WA, USA; www.microsoft.com), the first consumer-grade application of this technology. Based around a projected light camera originally developed by PrimeSense (Tel Aviv, Israel; www.primesense.com), the Kinect Camera allows users to control and interact with the Xbox 360 gaming console using gestures, spoken commands, or presented objects and images. For machine-vision applications, however, white-light projection systems are more common, often using DLPs from Texas Instruments (Dallas, TX, USA; www.ti.com) or liquid crystal on silicon (LCOS) microdisplay devices such as those from Elcos Microdisplay Technology (Sunnyvale, CA, USA; www.elcosmicro.com).
Like single-laser-based structured light systems, digital fringe projection systems can be deployed either using off-the-shelf projectors and cameras or combined projector/scanner combinations.
At VISION 2009 in Stuttgart, 3D Dynamics (Gravenwezel, Belgium; www.3ddynamics.eu) showed a 3-D image scanner called Mephisto that uses a DLP from InFocus (Portland, OR, USA; www.infocus.com) and a FireWire camera from Allied Vision Technologies (Stadtroda, Germany; www.alliedvisiontec.com) camera to generate 3-D images at 30 frames/s (see “Off-the-shelf cameras and projectors team up for 3-D scanning,” Vision Systems Design, February 2010).
Then, at VISION 2010, both GFMesstechnik (Berlin, Germany; www.gfmesstechnik.com) and ShapeDrive (Munich, Germany; www.shape-drive.com) showed 3-D scanners that integrate both the projection light source and CMOS camera into single units. While the GFMesstechnik design uses a TI DLP to perform digital fringe projection, engineers at ShapeDrive opted to use an LCOS light engine.
However, this is not the only difference between the two systems. By integrating an ARM 9 processor into the GFMesstechnik AreaScan3D system, point cloud information can be directly output over an Ethernet interface. Rather than perform this operation in the scanner itself, the ShapeDrive system outputs interim image data to a PC over a GigE Vision interface. Here, images are processed and point cloud data generated. The ShapeDrive system also allows acquisition of regular high-resolution images and color images that can be combined with the 3-D data. ShapeDrive offers an open system that enables users to access and modify various system parameters. A GenICamTL interface is available to connect the sensors to the MVTec Halcon standard software.
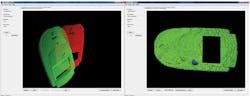
While the €6500 cost of the ShapeDrive includes tools for direct 3-D point cloud processing, third-party software such as Rapidform from Rapidform (Sunnyvale, CA, USA; www.rapidform.com) and Geomagic from Geomagic (Research Triangle Park, NC, USA; www.geomagic.com) must be used to perform more complex image analysis such as template matching data with 3-D CAD models (see figure). Likewise, while the €12,000 AreaScan3D system directly outputs point cloud data, this must be used in conjunction with third-party software to perform more sophisticated data analysis.

More Vision Systems Issue Articles
Vision Systems Articles Archives