Video cameras and high-speed imaging detect insect locomotion

Video cameras and high-speed imaging detect insect locomotion
By Shari L. S. Worthington, Contributing Editor
The PolyPEDAL (Performance, Energetics, and Dynamics of Animal Locomotion) laboratory of Robert Full, physiologist and Chancellor`s Professor at the University of California at Berkeley, performs internationally recognized research programs in comparative physiology and biomechanics that examine the general principles of animal and insect locomotion (see "Studying insect locomotion," on p. 32). Using high-speed-camera and imaging techniques, Full`s research has progressed to the point where it now provides biological stimulus for computer animations and the design of multilegged robots.
To set the stage for taking real-time pictures of the creatures in motion (from many angles in a three-dimensional process), segments of images are videotaped and transferred to computer files using frame grabbers. The images are then computer-analyzed using various imaging-analysis software.
Studying locomotion
The PolyPEDAL laboratory focuses on four basic areas of study: the cost of locomotion, metabolic capacity and endurance, leg musculoskeletal mechanics, and biomechanics. To study small, skittering creatures, the laboratory makes use of a large amount of video, imaging, computer, and mechanical equipment. For instance, exercise physiology is examined using treadmills and aerobic measurements; biochemical analysis is performed by measuring lactic acid and high-energy phosphate; biomechanical performance is analyzed with force plates, photoelastic gelatin, and high-speed, three-dimensional (3-D) image-motion analysis; and locomotive behavior across species is predicted with high-performance simulation workstations.
Says Full, "The economy of locomotion is remarkably similar for animals that differ in leg architecture, leg number, skeletal type, and body temperature, if you remove the effects of size. For instance, a four-legged mouse, four-legged lizard, eight-legged crab, and 42-legged centipede of the same size have similar economies. Size alone can explain much of the variation we see. But we`ve uncovered some amazing differences in the cost of locomotion by studying even smaller life forms, such as insects" (see Fig. 1).
To examine the effects of variation in body form on the mechanics of animal locomotion, the PolyPEDAL laboratory intensely studies biomechanics, such as in their experiments with cockroaches (see "Pendulums and pogo sticks, " on p. 36). All the laboratory`s investigations start with the application of reflective markers to the insect in question, in this case, the American cockroach (mass = 0.83 g). These markers are used as points of reference for the imaging portion of the experiment. Minitreadmills are used to measure the ground reaction forces and movements of the insects.
Miniature developments
The miniscale or force platform at the PolyPEDAL laboratory required a structure that could measure the force generated by an insect that weighed just one-twentieth of an ounce. A force platform was eventually designed by Full and Berkeley undergraduate Michael Tu. Their force plate consists of 24 strain gauges made out of silicon slivers and gold wires about twice the thickness of a hair. All the gauges on the beams and the soldering of wires to terminals were done by hand, then covered with a layer of wood a half-millimeter thick.
To set the stage for taking real-time pictures of the creatures in motion (from many angles as locomotion is obviously a 3-D process), a runway is set up to include a gelatin track placed between crossed polarizing filters. The gelatin force platform is distinct from the treadmill and the force platform (see Fig. 2). Illuminated from below, a high-speed Redlake Imaging MotionScope HR1000 video camera records the stress-induced optical signals from above at 1000 frames/s. The size and skew of the optical patterns generated by the insect on the gelatin relate to the magnitude and direction of the force.
Segments of the images are videotaped and then transferred to computer files using a frame grabber (Neotech Image Grabber for the NuBus). The images are analyzed on an Apple Power Mac 9500 computer using different imaging-analysis software packages, such as: NIH Image, and National Instruments` Ultimage Concept VI and LabVIEW.
Images of the insects are also captured from different angles above the treadmill so that a 3-D image of insect leg movements can be recreated. Several high-speed digital cameras are used to capture images of the moving cockroaches at 1000 frames/s. The cameras include Kodak`s EktaPro 1000, the NAC 1000, and the Redlake HR1000.
Full says, "The Redlake [cameras] were recently added to the experimental setup because they were the first high-speed cameras on the market with a small form factor and reasonable cost. As a result, they are used to look at the action above and below the minitreadmill."
The high-speed cameras download their data to a Peak Performance 3D Motus System at 10 to 30 frames/s. This Windows-based motion-capture system combines high-speed video-capture boards (a Matrox Marvel II frame grabber and a Matrox Studio Express compression card) with software for detailed analysis of the data. Motus software converts pixel locations from the images into units, such as meters. This is done by digitizing a calibration frame that has been placed in the plane of motion in which the roach moves. Kinematic calculations are then performed using linear displacements, angular displacements of the joint, linear velocities, joint velocities, linear acceleration, and centers of mass.
Full also uses the Motus software to transform 2-D data into 3-D graphics. This is accomplished by digitizing several views of the same image (collected by two to six cameras located at different angles from the insect) and a direct-linear-transformation (DLT) mathematical process. With DLT, the original 2-D data can be converted into 3-D graphics, which are then rotated in space for viewing from different perspectives. This analysis reveals the changing position of the reference markers and, therefore, the roach`s locomotive behavior.
The results of Full`s research using high-speed imaging are interesting. For instance, he found that roaches use an alternating tripod-stepping pattern at 0.44 to 1.0 m/s, which is basically a running or bouncing gait. At their highest speeds (1.0 to 1.5 m/s), the roaches switch to quadrupedal and bipedal running. Basically, the roaches are able to run exceptionally fast on their two hind legs by taking advantage of their aerodynamic shape. Wind-tunnel experiments at the laboratory showed that when the roach is sprinting, the air pushes against it so hard that it keeps the insect from falling down. Furthermore, this heretofore unheard of running motion generates the same amount of mechanical energy per unit mass that is used by animals five times larger in mass.
Advanced facilities
The PolyPEDAL laboratory scientists have amassed an impressive collection of imaging instruments and computers. Several motion-kinematics workstations are available. They include two Kodak EktaPro 1000 high-speed video cameras capable of collecting image data at 1000 frames/s; a VideoLogic high-speed video camera (320 frames/s); a dedicated Intel-Pentium PC computer for studies on mechanics; a Peak Performance 3-D motion-analysis system with color monitor; two Panasonic VCRs for analysis, several Redlake high-speed video cameras (1000 frames/s); and two NAC high-speed, color video cameras (1000 frames/s).
For studying mechanics, five Power Mac 9500 computers are fully equipped with frame grabbers, LabVIEW software, and National Instruments` analog-to-digital converters. Moreover, separate workstations are available for metabolic studies, EMG analysis, modeling, muscle studies, and data visualization, where Silicon Graphics` computers and digital cameras for microscopes are used.
"Next, says Full, "we are going to study the motion of nature`s smallest runners, such as ants. We are also working closely with engineers that use micro-electro-mechanical system (MEMS) technology so that we can measure the force produced by a single leg of an animal 1 mm long. Discoveries in this area could inspire the design of 1-mm MEMS/silicon robots. We also hope to collect more three-dimensional motion data that will allow us to produce a complete three-dimensional, dynamic musculoskeletal simulation of a running insect. This will let us test the hypotheses behind the control systems that are ultimately used in robots. Most important, we await the development of smart agents that can image-process natural markers on animals and autotrack them through time."
Adds Full, "We must preserve biodiversity, even of the must disgusting animals, because they can lead to major discoveries about how animals work. Especially in the case of humans, these animals can tell us a lot about our muscles and skeletons. They can also help us learn about how we interact with our environment."


FIGURE 1. The economy of locomotion is remarkably similar for animals that differ in leg architecture, leg number, skeletal type, and body temperature, if the effects of size are removed. A four-legged mouse, four-legged lizard, eight-legged crab, and 42-legged centipede of the same size have similar locomotion economies.
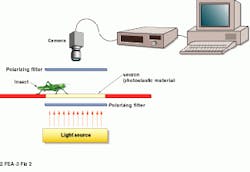
FIGURE 2. The track is actually a photoelastic force platform; it consists of a gelatin slab fitted into a track between a pair of polarizing filters with perpendicular axes and a light source. A video camera above the top filter records the emerging light. The camera and video recorder are attached to a Power Mac 9500 computer for image capture, storage, and analysis.
Studying insect locomotion
Picture a horror movie, filled with insects--fast insects--so fast that some insects have even set speed records. Then, move the whole scene to California and the laboratory of Robert Full, physiologist at the University of California at Berkeley. He is a man with a penchant for the multilegged.
Full`s laboratory, the PolyPEDAL (Performance, Energetics, and Dynamics of Animal Locomotion) laboratory, contains trotting ants, galloping crabs, undulating centipedes, and a famous cockroach that holds the record for insect speed in the Guinness Book of World Records. Full and his students study how muscles and skeletons work during movement by exploring the extraordinary diversity of animals in nature. They focus on what many consider strange and less-than-lovable creatures because they are looking to answer questions related to the energy costs of locomotion. Does the cost depend on leg number? On leg design? On body form or type of skeleton being used? These are all interesting questions that are yielding some unexpected findings.
For instance, the laboratory scientists have discovered that the mechanical energy that a human, a crab, a cockroach, a dog, or a horse generate to move 1 m is 1 J relative to body mass; this energy value is the same despite the fact that humans differ radically from other creatures. What`s more, two-, four-, six-, and eight-legged animals all can push on the ground to move in the same way, like a pogo stick, despite their differences in structure. Studying the exercise physiology of crabs, as well as cockroaches running on treadmills, reveals, like humans, some creatures are extraordinary athletes and others are couch potatoes.
According to the laboratory scientists, these creatures play crucial roles in Professor Full`s internationally recognized research program in comparative physiology and biomechanics, a program that shows how examining a diversity of animals leads to the discovery of general principles of animal locomotion. Moving far beyond insect locomotion, Full`s research has progressed to the point where it now provides biological stimulus for computer animations and the design of multilegged robots that will be used for checking pipes at nuclear plants, cleaning toxic wastes, and performing fire and police work.
S. L. S. Worthington
Pendulums and pogo sticks
Until the PolyPEDAL Laboratory was established, researchers studying animal locomotion concentrated on tetrapods (dogs, horses, and so forth) to construct models of walking and running. Even though there are several hundred times more arthropod species in this world, it`s much easier to film and image-analyze the four heavy legs of a running dog than the six nearly weightless limbs of a wriggling ant. But, as a result, it was generally believed that running was defined by all of an animal`s limbs leaving the ground.
Today, researchers such as Robert Full are focusing on two simple locomotion models: pogo sticks and pendulums. In 1986, while Full was conducting postdoctoral research in the laboratory of Thomas McMahon, a biomechanicist at Harvard University, it was discovered that running can occur when one foot is kept on the ground, if the human body behaves like a pogo stick.
When a human plants one leg on the ground, the body sinks down on the leg instead of being pushed upward. Meanwhile, the leg`s tendons act like springs. They stretch and snap back, and they store and release energy, just like the spring in a pogo stick. This movement propels the body upward and forward. Therefore, running, like walking, recovers energy and cuts down on energy expenditure.
The other current model of locomotion compares animal movement to the movement of a pendulum. When a human walks, the body behaves like an upside-down pendulum. The foot set down in front is the pendulum`s axis; the center of mass is the hanging weight. As the stride is begun, the body works against gravity, forcing the body`s center of mass upward with the leg until the body reaches its highest point.
Gravity then takes over, and the body swings down until the leg comes in contact with the ground. The next stride is even easier because the body can use the energy provided by gravity to vault into successive steps, just as a pendulum reclaims its energy with each swing.
S. L. S. Worthington