Robotic vision system examines sewer pipes
Many pipe and sewer inspections are done manually by recording images onto videotape from solid-state cameras located within the pipe. Later examination of the recorded images is used to analyze the pipe for cracks, as well as to provide a documented record of the pipeline's condition at a particular time.
Now, a European Commission project named ISACC aims to increase the speed of sewer inspection and improve the accuracy of pipe-defect coding. As part of 23 pilot projects aimed at different machine-vision applications and markets, under the umbrella of EUTIST-IMV, a European Commission funded project, ISACC has been developed by a multinational team consisting of Pearpoint-Telespec (Bordon, Hampshire, UK; www.telespec.co.uk) and the Center for Machine Perception (CMP) at the Czech Technical University (CTU; Prague, Czech Republic; cmp.felk.cvut.cz), among others.
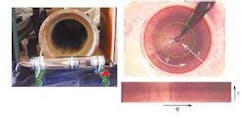
In operation, ISACC is a robotics-based sewer crawler machine that can capture images all around the inside of a sewer pipe over 360°. Using an unwarping transform software function, a view of the pipe is presented in a horizontal strip format that enables defects such as cracks to be more easily detected. Capable of inspecting pipes of up to 0.5 m in diameter, the robotic system was required to image the complete inner surface wall as it moved along the pipeline.
Vladimir Smutny, assistant professor at the CTU, and his colleagues used a number of off-the-shelf components in the design of this imaging system. To image the circumference of the pipe, a 768 × 576-pixel, color CCD camera from Mintron (Taipei, Taiwan; www.mintron.com) is mounted in a special housing with a panoramic lens. By aligning the camera with the panoramic lens, captured images represent the 360° circumference of the inner pipe wall. The PAL video output from the color camera is fed from the ISACC robot to a DT3153 frame grabber from Data Translation (Marlboro, MA, USA; www.datx.com).
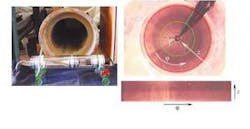
Sequences of images from the camera are unwarped using a software program called VirtualDub created by Karel Hanton of the CMP. After unwarping, a panoramic image of 1127 × 210 pixels is obtained. A scale is then imposed on the image, which permits the measurement of pipe defects.
The system has been tested in Prague, Czech Republic. The Prague trials took place within sewer pipes in and around the city. According to Mark Sawyer, the Edinburgh, Scotland-based coordinator for the EUTIST-IMV project, computer vision provided much faster inspection times, greater measurement accuracy, and improved data collection.
"The capability of the ISACC project improves the maintenance procedures of the sewer network, making it more attractive for companies in communications industries to use the network for cable infrastructure, rather than excavating existing roadways," Sawyer adds.