Page 2: Researchers developing NASA-inspired vision-enabled surgical robot for children
The robotic controller is a Windows-based PC connected to two servo amplifier units that receive analog commands from the PC and regulate the current on its corresponding motor at the joints on both the robotic arm and the anastomosis tool.
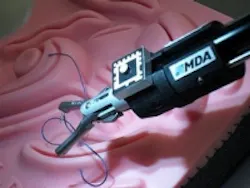
The system is the first robotic surgical arm specifically designed for delicate pediatric procedures, including cardiac surgery, neurosurgery, fetal surgery, urosurgery and general surgery. With the KidsArm system, surgeons operate the tool using a pair of hand controllers while using the images provided by the vision system for guidance.
"Our tests indicate we can operate on tiny structures such as blood vessels without damaging them," said Thomas Looi, the project director at SickKids in Toronto, Canada in a NASA press release. "The goal of robotic arm is to help doctors perform certain procedures many times faster than if they were only using their hands and with increased accuracy.”
He added, “Some of this would be done autonomously. While we are not quite there yet, KidsArm is able to perform three to five suture points autonomously."
The system is currently being tested at the SickKids facility in a research environment in order to obtain information on the next stages of development. The CIGITI team presented a paper on the topicat the Institute of Electrical and Electronics Engineers Inc./Robotics Society of Japan International Conference on Intelligent Robots and Systems, a robotics conference in Tokyo.
View the NASA press release.
Share your vision-related news by contacting James Carroll, Senior Web Editor, Vision Systems Design
To receive news like this in your inbox, click here.
Join our LinkedIn group | Like us on Facebook | Follow us on Twitter | Check us out on Google +
Page 1 | Page 2

About the Author

James Carroll
Former VSD Editor James Carroll joined the team 2013. Carroll covered machine vision and imaging from numerous angles, including application stories, industry news, market updates, and new products. In addition to writing and editing articles, Carroll managed the Innovators Awards program and webcasts.