Page 2: Unmanned ground vehicles display autonomous route clearing capabilities
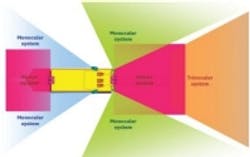
The lateral vision system, which provides perception to detect oncoming traffic at intersections, consists of two cameras on either side of the front camera bar. For this system, which utilizes a monocular obstacle detection algorithm two Allied Vision Technologies Pike 2 cameras were used. AVT Pike 2 cameras feature a 1920 x 1080 Truesense KAI-2093 CCD image sensor with a 7.4 µm x 7.4 µm pixel size and a 31 fps frame rate.
A rearview imaging system is positioned on the top of the cab looking backward and downward to detect passing vehicles, utilizes a monocular obstacle detection algorithm and is linked with a laser scanner in the back for object detection. This system also consists of two 0.8 MPixel Flea2 cameras.
Oshkosh is conducting its TerraMax UGV product development independently and also in collaboration with the U.S. Marine Corps and Army to identify opportunities to use UGVs for route reconnaissance and route clearance missions. These current projects build upon previous contracts with the U.S. Office of Naval Research for the Cargo UGV Project, which focused on bringing UGV capabilities to logistics convoy missions and reducing troops’ exposure to threats, according to Oshkosh.
View more information on the TerraMax.
Also check out:
NASA’s Mars Curiosity rover celebrates Martian Year anniversary with a selfie
Airborne image sensor capable of detecting dangerous substances and gases
(Slideshow) Six different ways infrared imaging technology is being used
Share your vision-related news by contacting James Carroll, Senior Web Editor, Vision Systems Design
To receive news like this in your inbox, click here.
Join our LinkedIn group | Like us on Facebook | Follow us on Twitter | Check us out on Google +
Page 1 | Page 2

About the Author

James Carroll
Former VSD Editor James Carroll joined the team 2013. Carroll covered machine vision and imaging from numerous angles, including application stories, industry news, market updates, and new products. In addition to writing and editing articles, Carroll managed the Innovators Awards program and webcasts.